SATO Wataru Laboratory
ヒトとロボットによるヒトの背中への快な撫でタッチ
(Ishikura, Yuki, Sato, Takamatsu, Yuguchi, Cho, Ding, Yoshikawa, & Ogasawara: Sensors)
快なタッチは社会的相互作用の重要な側面であり,介護技術として広く用いられている.
介護者の不足から生じる問題に対処するため先行研究では,快なタッチを行うことができるロボットの開発が試みられてきた.
しかし,快なタッチをロボットが行えるかどうかは不明である.
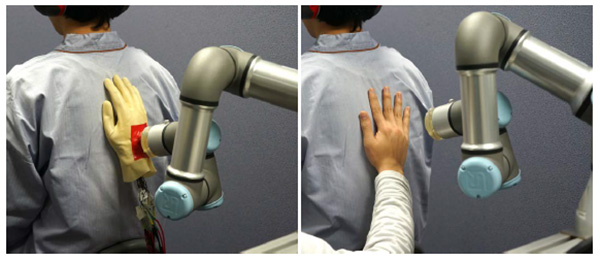
この問題を調べるため我々は,ヒトとロボットの背中を優しく撫でる速度が,ヒト参加者の感情反応に与える影響を比較した.
ヒトまたはロボットが2つの異なる速度(2.6cm/sと8.5cm/s)で参加者の背中を撫でた.
参加者の主観反応(感情価と活性度の評定)と生理反応(皺眉筋と大頬骨筋の筋電図および皮膚コンダクタンス反応)が測定された.
主観評価では,8.5cm/sの速度のほうが2.6cm/sの速度よりも,ヒトもロボットもより快で活性度が高いことが示された.
皺眉筋の筋電図では,8.5cm/sの速度で2.6cm/sに比べて,ヒトもロボットも活動が低下することが示された.
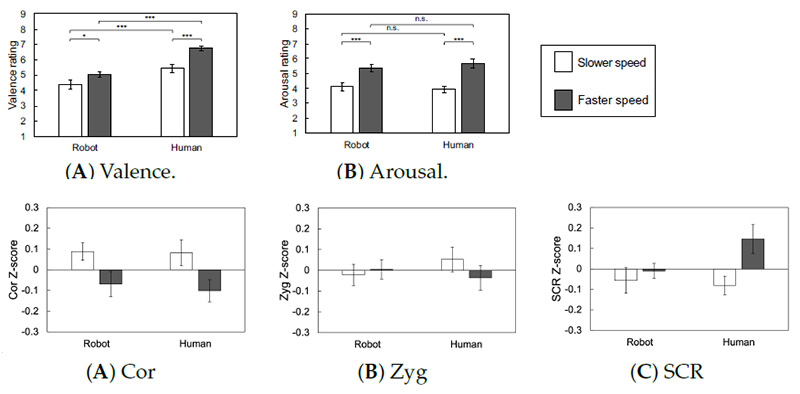
こうした結果から,主観的・生理的な快感情反応に対するヒトとロボットの撫で速度の効果が類似していることが示され,ロボットがヒトと同様に快なタッチを提供できることが示唆される.
最近の研究にもどる
メインにもどる